Аварийное оповещение с ключом лицензии
- Коммерческий номер продукта ADC-5000-VA | Номер продукта. F.01U.282.794
- Простое и надежное подключение к системе аварийного оповещения Praesideo/PAVIRO
- Удобная установка с простым подключением
ООО «Инженерный центр «ЭФЭР» разработаны технические решения «Автоматическая установка водяного пожаротушения маслонаполненных силовых автотрансформаторов на объектах энергетики России с применением лафетных стволов осциллирующего типа”.
Предлагаемый способ тушения трансформаторов обладает рядом положительных особенностей:
Проектные решения
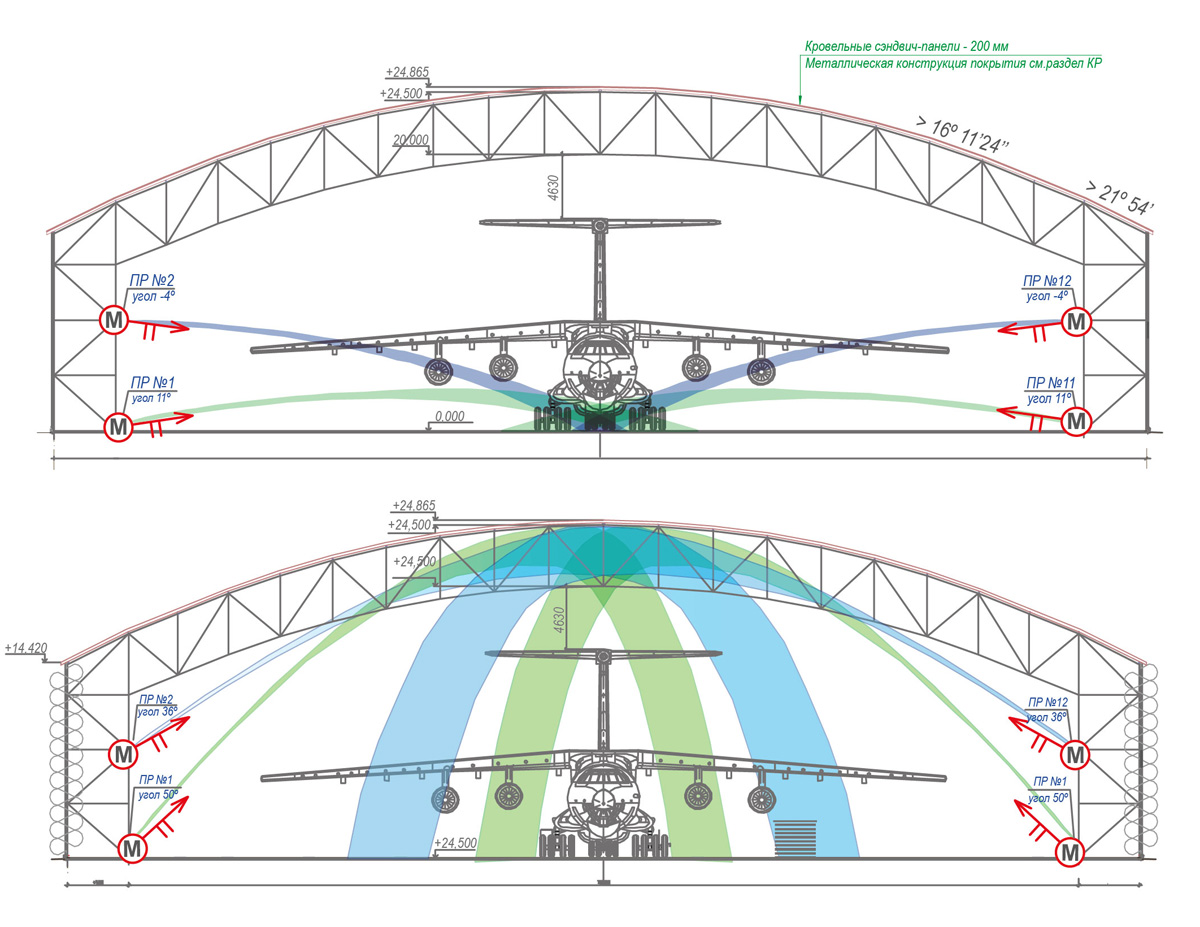
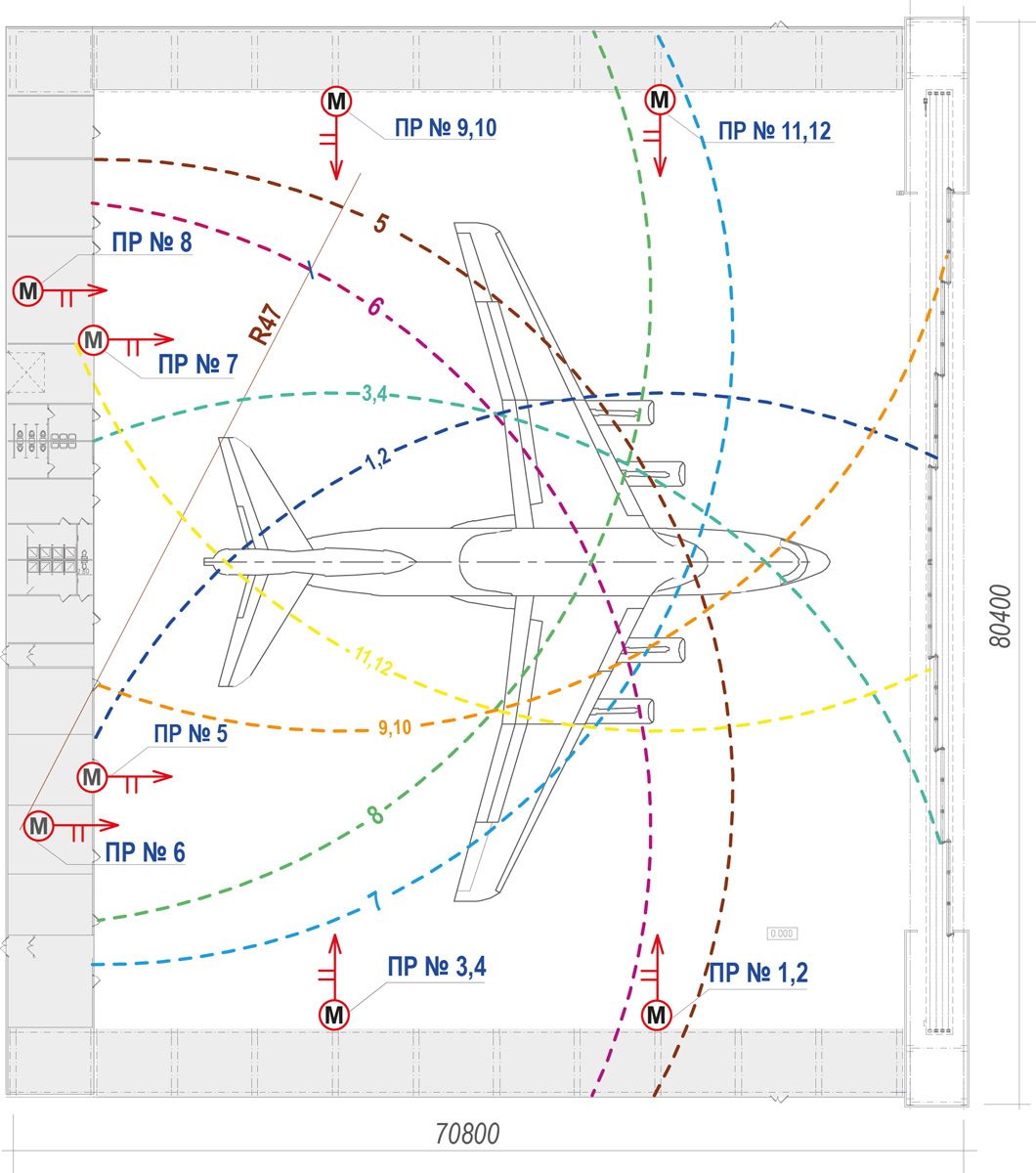
На рис. 1,2 представлена схема защиты силового масляного трансформатора автоматической установкой пожаротушения с применением лафетных стволов с осцилляторами.
Рис.1. Схема защиты силового масляного трансформатора автоматической установкой пожаротушения с применением лафетных стволов с осцилляторами
Рис.2.Схема установки пожарных роботов на плане объекта в разрезе
Ссылочные документы:
1. СП5.13130-2009. Установки пожарной сигнализации и пожаротушения автоматические. Нормы и правила проектирования.
2. ВНПБ 39-16. Роботизированная установка пожаротушения. Нормы и правила проектирования. Специальные технические условия.
3. Рекомендации по проектированию установок автоматического пенного пожаротушения в современных ангарах. Министерство гражданской авиации и Аэропроект, 1980 г.
В качестве АУП в соответствии с требованиями для ангарных комплексов для стоянки и обслуживания воздушных судов, согласованными во ВНИИПО и ДНД МЧС РФ, принимается роботизированная установка пожаротушения (РУП). Применение РУП обусловлено эффективностью этого способа тушения, невозможностью применения спринклерных АУП для защиты зданий высотой более 20 м.
Учитывая специфику защищаемого объекта, за основную пожарную нагрузку принимается розлив остатка авиационного топлива, поэтому в качестве ОТВ рекомендуется применять:
— для ликвидации возможных очагов пожара – пену низкой кратности на основе водного раствора фторированного пенообразователя;
— для орошения несущих конструкций и оборудования – распылённую лафетным стволом воду.
Общий расход огнетушащего вещества и продолжительность непрерывной работы РУП должны быть не менее указанных в таблице 5.1 СП 5.13130.
Общий расход РУП уточняется с учетом количества пожарных роботов (роботизированных пожарных стволов) ПР, одновременно задействованных в рабочем режиме, гидравлических потерь в питающем трубопроводе, характера и величины пожарной нагрузки, технологических особенностей объекта, группы помещений 2 или 4 по приложению Б СП 5.13130.
Каждая точка помещения или защищаемого оборудования должна находиться в зоне действия не менее чем двух ПР. Расстановка ПР должна исключать протяженные «мертвые» зоны для автоматических извещателей наведения, а также «мертвые» зоны, не подверженные действию ОТВ.
РУП обеспечивает функционирование в следующих режимах:
— автоматическое позиционное или контурное программное сканирование;
— ручное управление ПР движением пожарного ствола в горизонтальной и вертикальной плоскостях с переключающего устройства дистанционного пульта управления или по оперативной программе дистанционного пульта;
— ручное кнопочное управление движением пожарного ствола в горизонтальной и вертикальной плоскостях с местного поста управления (для ПР, управляемых через шкафы управления электроприводами);
— ручное механическое управление непосредственно рукояткой, расположенной на ПР.
Перемещение пожарного ствола ПР для поиска очага загорания осуществляется по сигналу от автоматических пожарных извещателей общего обзора или зонных автоматических извещателей, входящих в состав АУПС.
Позиционное или контурное программное сканирование с подачей ОТВ в пределах угловых координат загорания осуществляется по сигналу ИК-сканера, установленного на ПР, в соответствии с информационным обеспечением (конфигурационная информация), хранящимся в энергонезависимой памяти ШК-УСО. Информационное обеспечение подготавливается с помощью ПО «Конфигурирование РУП».
В соответствии с конфигурационной информацией для каждого ПР обеспечивается корректировка угла возвышения ствола с целью учета баллистики струи в зависимости от давления на выходе ствола и расстояния до очага пожара в пределах эффективной дальности ПР).
Угловые координаты наведения на точки очага загорания, расстояние до этих точек рассчитывает ШК-УСО. При этом ПР выполняет последовательное наведение на точки контурной линии, в зависимости от расстояния до точки устанавливается требуемое положение насадка (угол распыливания струи), а также с помощью датчика давления измеряется текущее давление, выбирается значение поправки вертикального угла наведения.
Формирование команды на перемещение ПР, оснащённых ИК-сканерами, для поиска координат очага пожара должно осуществляться при срабатывании одного из извещателей общего обзора или одного из зонных извещателей, включенных по логической схеме «ИЛИ».
Формирование команды управления на подачу ОТВ должно осуществляться при регистрации загорания двумя автоматическими извещателями наведения, установленными на двух ПР.
Для уменьшения инерционности срабатывания установки и увеличения точности регистрации очага загорания рекомендуется в качестве извещателей общего обзора или зонных извещателей использовать адресные пожарные извещатели пламени или каждый неадресный извещатель пламени выводить на свой шлейф приёмно-контрольного прибора с последующей передачей сигнала о срабатывании каждого извещателя на блок БК-16.
Размещение извещателей пламени должно обеспечивать контроль защищаемой поверхности с противоположных направлений и исключать «мертвые» зоны. В ангарах для самолётов и вертолётов извещатели необходимо устанавливать в двух уровнях:
— извещатели нижнего уровня должны контролировать пространство от пола до нижней плоскости аппарата;
— извещатели верхнего уровня – верхнюю плоскость аппарата и пол.
Охлаждение несущих конструкций здания осуществляется при поступлении сигнала о перегреве ферм в автоматическом и/или дистанционном режиме.
Контроль температуры несущих ферм покрытия необходимо осуществлять линейными тепловыми извещателями, проложенными по нижнему поясу каждой фермы с идентификацией сигнала по каждой ферме, без обеспечения контроля каждой точки фермы двумя линейными извещателями.
В больших ангарах допускается установка выдвигающихся пожарных роботов в полу в приямках с автоматически открывающимися люками, а также на площадках под нижним поясом несущих ферм.
Питающий водопровод РУП предусматривается кольцевым, водозаполненным (до дисковых затворов), давление в дежурном режиме поддерживается автоматическим водопитателем, установленным в насосной станции.